在2026北京亦莊機器人半程馬拉松活動現場,阿里巴巴旗下高德帶來了一場震撼科技界的發布——全球首款開放環境全自主具身機器人“高德途途”正式亮相,同時推出的“ABot”全棧具身技術體系,更是為具身智能領域樹立了新的標桿。
“高德途途”是一款四足機器人,在活動現場的演示環節中,它展現出了驚人的能力。面對復雜的環境,它成功協助視障人士完成避障、在人群中穿行等極具挑戰性的任務,真正實現了從實驗室環境到開放環境的跨越,為視障人士的出行帶來了新的希望和可能。
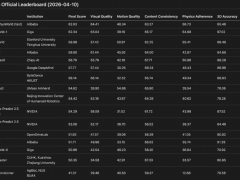
“高德途途”的出色表現,離不開背后強大的“ABot”全棧具身技術體系。這一體系被業內贊譽為“全球首個面向AGI的具身智能閉環”,在15項全球權威基準測試中均取得SOTA(世界領先水平)的成績,堪稱機器人行業的“超級大腦”。
傳統具身智能常常陷入“單點拼湊、封閉驗證”的碎片化困境,而“ABot”體系從架構上實現了重大突破。它采用數據、模型、應用三層飛輪式設計,形成“數據驅動模型、模型服務應用、應用反哺數據”的循環,使系統能夠持續自我進化,不斷提升性能。
“ABot”體系包含三大核心部分。首先是ABot - World,作為系統的“仿真基座”,它在全球物理合規性、動作可控性、零樣本泛化三大維度上均位居第一,成功打通了“虛擬訓練 - 真實部署”的閉環,為機器人的訓練和部署提供了堅實的基礎。
其次是ABot - N與ABot - M,被形象地稱為“運動雙核”。ABot - N掌管機器人的“雙腿”,ABot - M掌管機器人的“雙手”,它們在11項權威評測中斬獲SOTA,解決了機器人“去哪里”和“做什么”的基礎問題,讓機器人能夠更加靈活、準確地行動。
最后是ABot - Claw,它首創“Map as Memory”理念,將高德地圖與用戶私有地圖設為全局認知錨點,使機器人擁有持久沉淀的“世界記憶”,能夠更好地理解和適應周圍環境。
高德相關負責人介紹,“ABot”體系的設計邏輯源自高德的空間智能飛輪。依托近10億月活場景產生的海量時空數據與實時反饋,算法在閉環中持續迭代,推動模型對物理世界的認知不斷加深。這意味著高德不依賴單點技術突破,而是憑借飛輪在真實場景中持續運轉的“轉速”,建立起難以復制的體系化優勢。
此次發布會還有一個重磅消息,高德宣布將開源“ABot”全體系。這一舉措不僅是對高德“AMAP AI Inside”核心理念的深度踐行,更將重塑具身智能的研發范式,為整個行業的發展注入新的活力,加速AGI時代的全面到來。高德的這一舉動,被業內視為具身智能發展史上的重要里程碑,有望推動整個行業邁向新的歷史階段。